ROVER_1
Autonomous Waypoint Navigation
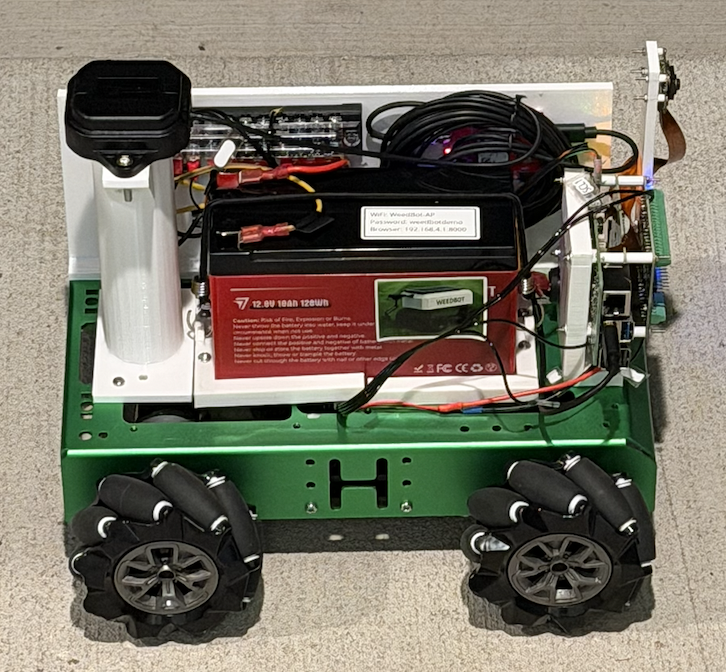
A compact autonomous rover designed for smooth, precise waypoint navigation. Built with custom Python control software, IMU fusion, mecanum kinematics, and predictive motion control.

Scroll to explore